Feature Extraction and Disentanglement
Feature Disentangle
- The GAN receives one vector as input and output a desirable result.
- We hope to control the characteristic of the output by mopdifying each specific value in the input vector.
- For general GAN, modifying a specific dimension of the vector commonly change the feature of the result unconsciously
- Because the actual distribution of each feature are intricate and entangled in the latent space.
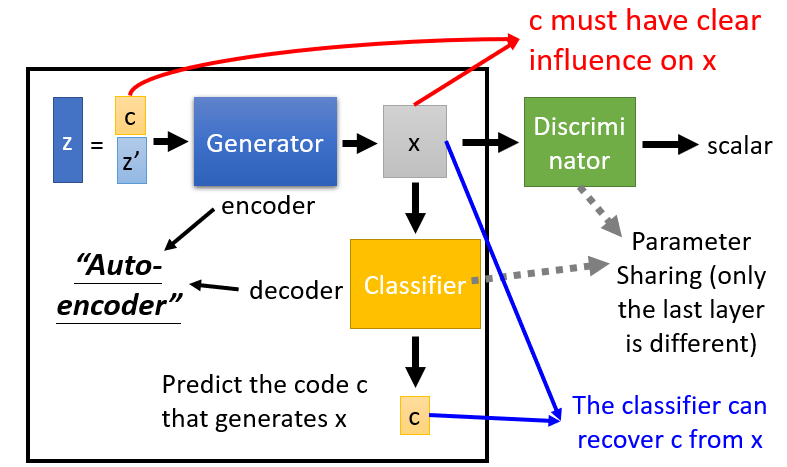
InfoGAN
- Split input
zto two parts,cencodes the different feature in each dimension andz'as input noise. - Classifier recover the predict
cfrom the outputxfrom the Generator, which supervises the generate to outputxwith the feature ofc. - Discriminator still output a scalar to represent the result good or not, but shares the parameter with Classifier except for the last output layer.
- Without Discriminator, the output from Generator will only focus on
cwhich benefit for the Classifier to predict, but generate bad results.
- Without Discriminator, the output from Generator will only focus on
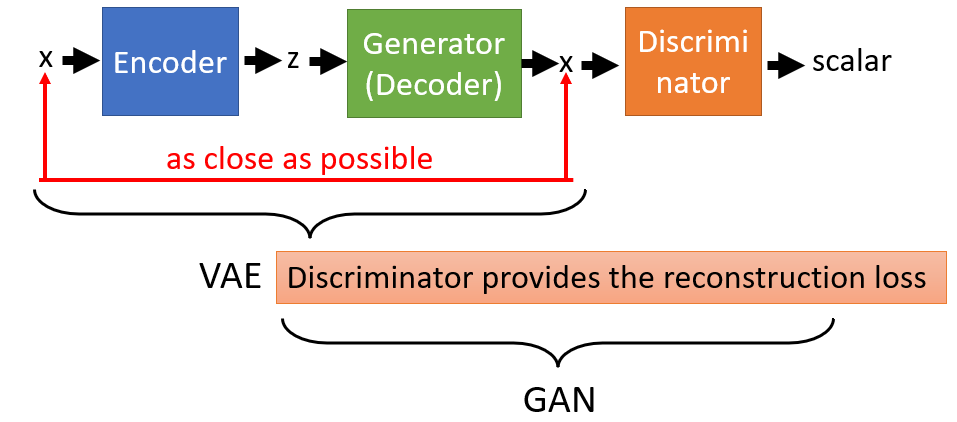
VAE-GAN
- Based on VAE (variational auto-encoder), VAE-GAN combines VAE and GAN
- VAE only generates obscure results.
- Discriminator
- Encoder is to encode the input image from the dataset to a normal distribution code
z, regularized by imposing a prior distribution over the latent distribution $p(z) - Generator is to generate images and cheat the distriminator
- Output the reconstruction image from the output
zof Encoder: minimize the reconstruction - Output the generated image from the noise sampled from the prior distribution: get
zas closed to the normal distribution as possible.
- Output the reconstruction image from the output
-
Discriminator is to distinguish the real, generated or reconstructed images.
- Algorithm of the training the VAE-GAN
- Initialize
Enc,Dec,D - In each training iteration:
- Sample
mimages $\{ x^{1}, x^{2}, \ldots, x^{m} \}$ from database distribution $P_{data}(x)$. - Generate
mcodes $\{\tilde{z}^{1}, \tilde{z}^{2}, \ldots, \tilde{z}^{m}\}$ from encoder, $\tilde{z}^i = Enc(x^i)$. - Generate
mimages $\{\tilde{x}^{1}, \tilde{x}^{2}, \ldots, \tilde{x}^{m}\}$ from decoder, $\tilde{x}^i = Dec(\tilde{z}^i)$. - Sample
mnoise samples $\{z^{1}, z^{2}, \ldots, z^{m}\}$ from the prior $P_{prior}(z)$. - Generate
mimages $\{\hat{x}^{1}, \hat{x}^{2}, \ldots, \hat{x}^{m}\}$ from decoder, $\hat{x}^i = Dec(z^i)$. -
Update Encto decrease reconstruction error ofMSE$\lVert \tilde{x}^i - x^i \rVert$, decrease $\textit{KL-divergence}(P(\tilde{z}^ix^i) \Vert P(z))$ - Update
Decto decrease reconstruction error ofMSE$\lVert \tilde{x}^i - x^i \rVert$, increase binary cross entropy $D(\tilde{x}^i)$ and $D(\hat{x}^i)$. - Update
Dto increase binary cross entropy $D(x^i)$, decrease $D(\tilde{x}^i)$ and $D(\hat{x}^i)$.
- Sample
- Initialize
Info: Another kind of discriminator can be implemented to output three labels of the result: real, generated and reconstructed.
- Algorithm of the training VAE-GAN
- Initialize
Enc,Dec,D - In each training iteration:
- Sample
mimages $\{ x^{1}, x^{2}, \ldots, x^{m} \}$ from database distribution $P_{data}(x)$. - Generate
mcodes $\{\tilde{z}^{1}, \tilde{z}^{2}, \ldots, \tilde{z}^{m}\}$ from encoder, $\tilde{z}^i = Enc(x^i)$. - Generate
mimages $\{\tilde{x}^{1}, \tilde{x}^{2}, \ldots, \tilde{x}^{m}\}$ from decoder, $\tilde{x}^i = Dec(\tilde{z}^i)$. - Sample
mnoise samples $\{z^{1}, z^{2}, \ldots, z^{m}\}$ from the prior $P_{prior}(z)$. - Generate
mimages $\{\hat{x}^{1}, \hat{x}^{2}, \ldots, \hat{x}^{m}\}$ from decoder, $\hat{x}^i = Dec(z^i)$. -
Update Encto decrease reconstruction error ofMSE$\lVert \tilde{x}^i - x^i \rVert$, decrease $\textit{KL-divergence}(P(\tilde{z}^ix^i) \Vert P(z))$ - Update
Decto decrease reconstruction error ofMSE$\lVert \tilde{x}^i - x^i \rVert$, increase binary cross entropy $D(\tilde{x}^i)$ and $D(\hat{x}^i)$. - Update
Dto increase binary cross entropy $D(x^i)$, decrease $D(\tilde{x}^i)$ and $D(\hat{x}^i)$.
- Sample
- Initialize
Info: Another kind of discriminator can be implemented to output three labels of the result: real, generated and reconstructed.
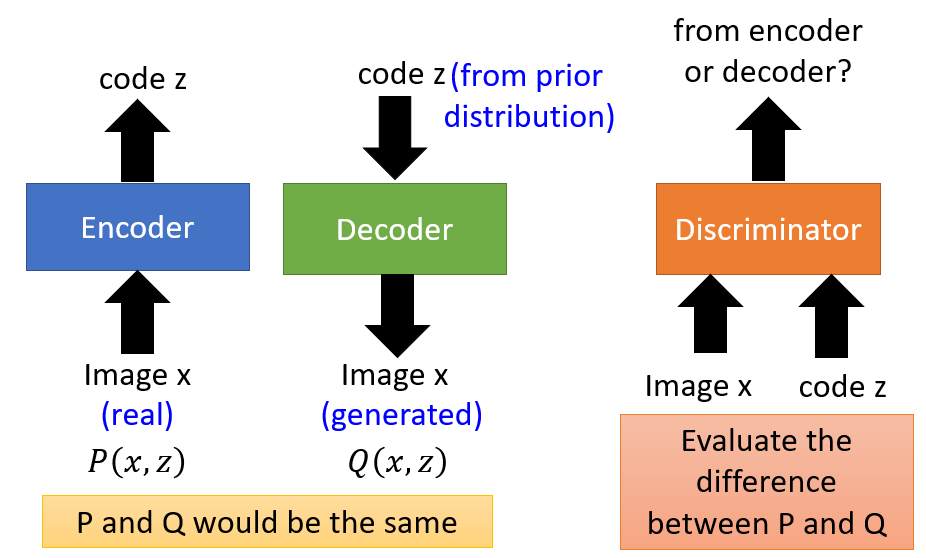
BiGAN
- Make pair of the input and output from Encoder and Decoder to feed into the discriminator, distinguishing the the input come from the encoder or the decoder
- Encoder takes the image
xfrom the dataset and generate codez, and make a pair(x, z)(the corresponding distributionP(x, z)) for discriminator.- Deceive Discriminator that the
P(x, z)is from eecoder.
- Deceive Discriminator that the
- Decoder takes the code
z'sampled from the prior distribution and generate imagex', and make a pair(x', z)(the corresponding distributionQ(x', z')) for discriminator.- Deceive Discriminator that the
Q(x', z')is from dncoder.
- Deceive Discriminator that the
- Discriminator evaluate the difference between the distribution from encoder and decoder.
- After the well training, the discriminator can not distinguish the distribution from encoder and decoder.
P(x, z)will be the same asQ(x', z').- The embedding code
zwill be similar to the code generated from the prior distribution, and the imagex'from decoder will be real. - The cycle consistency holds, which is similar to cycleGAN:
- Also,
Enc(x) = z=>Dec(z') = xfor allx'. - Similarly,
Dec(z) = x=>Enc(x) = zfor allz.
- Also,
- Algorithm of the training Bi-GAN
- Initialize
Enc,Dec,D - In each training iteration:
- Sample
mimages $\{ x^{1}, x^{2}, \ldots, x^{m} \}$ from database distribution $P_{data}(x)$. - Generate
mcodes $\{\tilde{z}^{1}, \tilde{z}^{2}, \ldots, \tilde{z}^{m}\}$ from encoder, $\tilde{z}^i = Enc(x^i)$. - Sample
mnoise samples $\{z^{1}, z^{2}, \ldots, z^{m}\}$ from the prior $P_{prior}(z)$. - Generate
mimages $\{\tilde{x}^{1}, \tilde{x}^{2}, \ldots, \tilde{x}^{m}\}$ from decoder, $\tilde{x}^i = Dec(z^i)$. - Update
Dto increase $D(x^i, \tilde{z}^i)$, decrease $D(\tilde{x}^i, z^i)$. - Update
Encto decrease $D(x^i, \tilde{z}^i)$. - Update
Decto increase $D(\tilde{x}^i, z^i)$.
- Sample
Note: It doesn’t matter that the D gives the positive score to the pair from Enc or another. What matters is that the score D gives to Enc or Dec should be opposite. The objective of Enc and Dec should also be the opposite of the objective of D so that D could not discriminate between the generated pair after the advesarial training.
- Based on the self-supervised way ofBiGAN, cycleGAN introduces the cycle consistency loss.
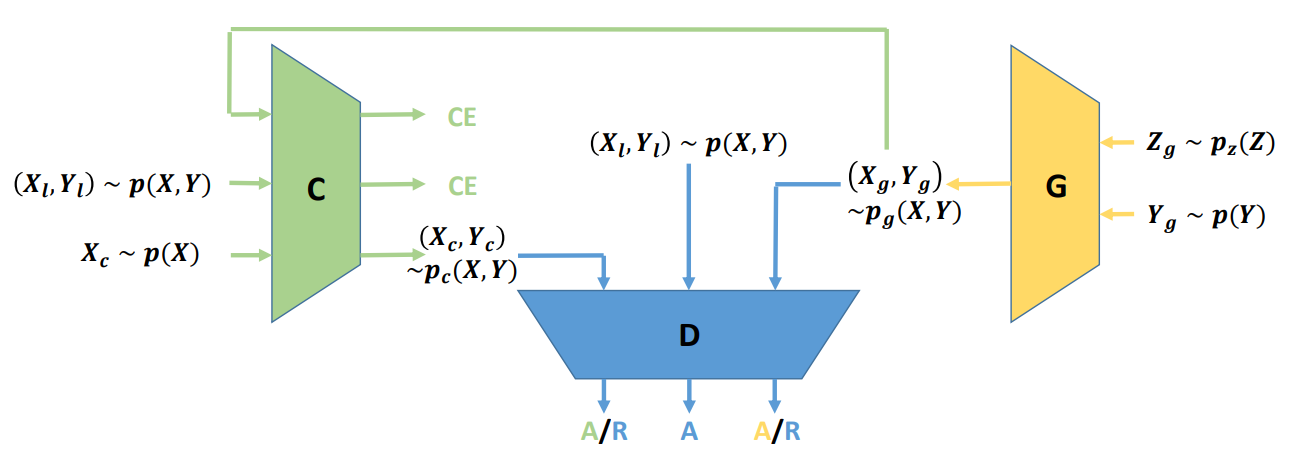
Triple GAN
- Semi-supervised learning way of training GAN consists of three parts: classifier, generator, discriminator.
- Generator receives the sampling noise $Z_g$ and conditional distribution $Y_g$ from the prior distribution, and output the pair of the image with the label $(X_g, Y_g)$
- Classifier outputs the label of the image,and disentangle the class and style of the input in both supervised and unsupervised way:
- Take the output image-label pairs from generator, calculate the cross entropy reconstruction loss between predicted label $\tilde{Y}_g$ with $Y_g$. This process is using weak self-supervised sample to train the classifier.
- Take sampling pair $(X_l, Y_L)$ from the dataset and supervised learning with the cross entropy reconstruction loss between the predicted $\tilde{Y}_l$ and $Y$.
- Classify sampling image $X_c$ as the predicted label $Y_c$. The predicted pair is sent to the discriminator.
- Discriminator solely identifies fake image-label pairs.
- Distinguish the real image-label pair sampled from the dataset directly.
- Distinguish the generated image-label pair from the generator.
- Distinguish the image and predicted label pair from the classifier.
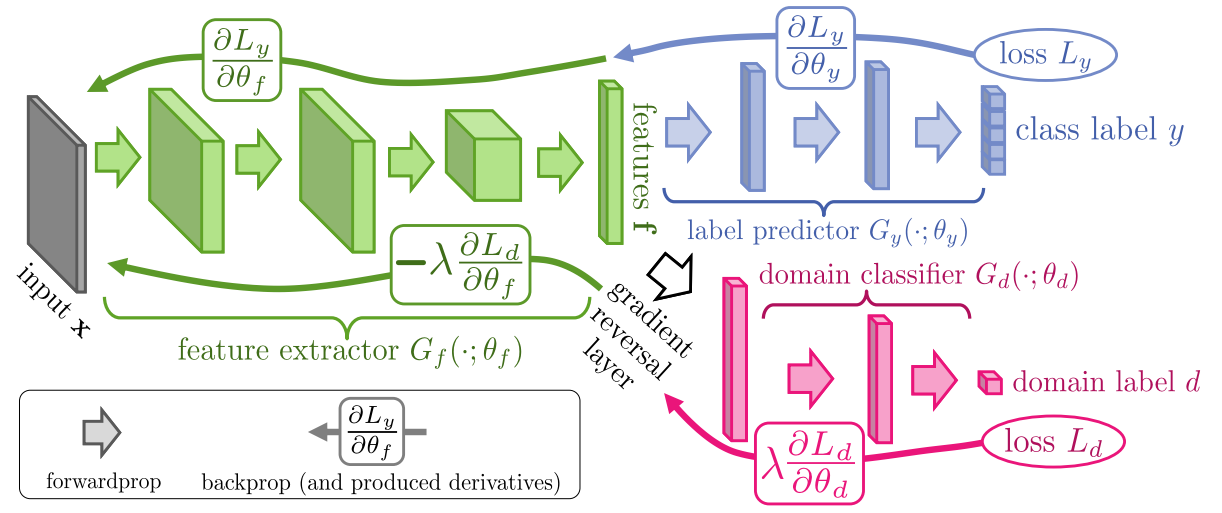
Domain-adversarial Training
- The network consists of three parts:
- Feature extractor: extract and map the input $x$ to the latent space.
- To maximize label classification accuracy
- To minimize domain lcassification accuracy
- Label predictor: predict the class label of the feature from the extractor.
- To maximize label classification accuracy
- Domain classifier: classify the source domain of the feature from the extractor.
- To maximize domain classification accuracy
- Feature extractor: extract and map the input $x$ to the latent space.
- Gradient reversal layer is an identity function during the forward propagation, but it multiplies its input by -1 during backpropagation.
- Because it leads the gradient ascent on the feature extractor with respect to the classification loss of Domain predictor, but gradient descent on the predictor itself.
Feature Disentangle
- The encoding from the original encoder includes mixture information, which is entangled.
- Embedding audio signal can be roughly classified as two parts
- Phonetic information: audio content, structures and semantic meaning
- Speaker information: audio speaker acoustic characteristics
- Utilize two encoder to disentangle the above two information in the latent space: Phonetic encoder and Speaker encoder.
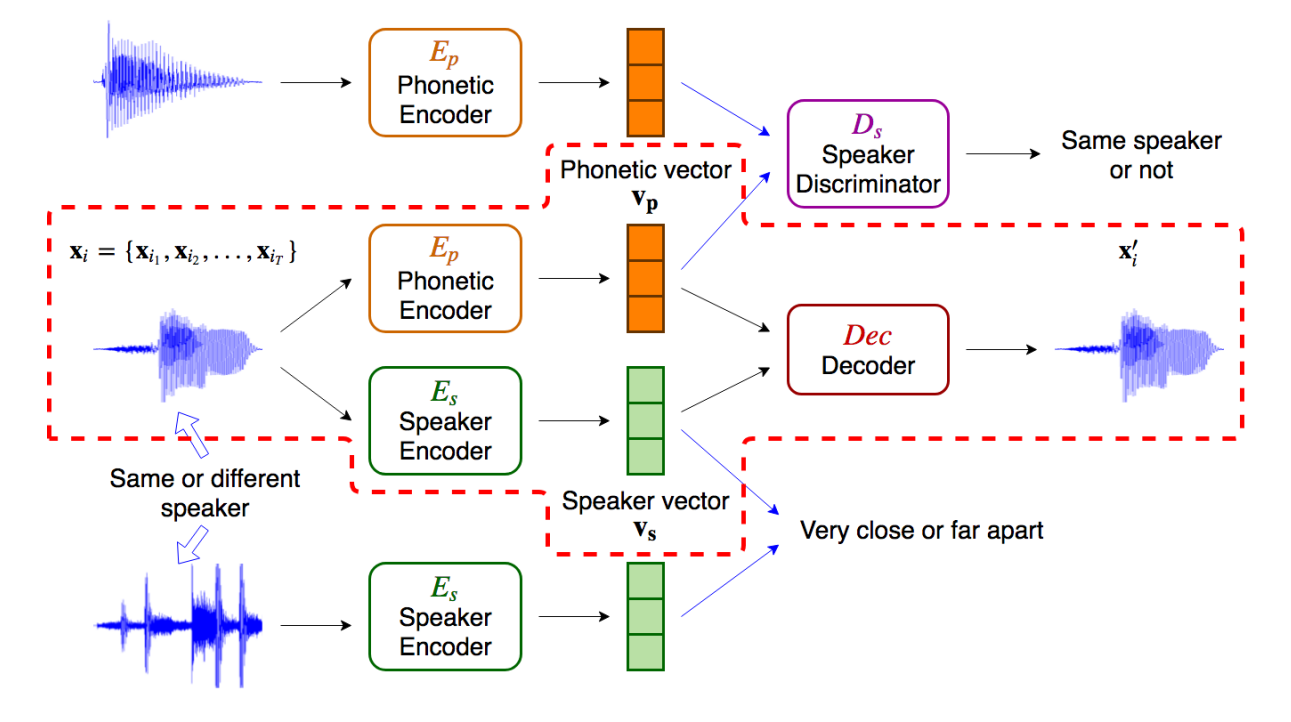
- For the audio source from the same or different speakers, the speaker vector $v_s$ from Speaker Encoder $E_s$ will be constrained as close or far apart as possible.
- To guide the Speaker Encoder $E_s$ only extract the acoustic characteristic to the speaker vector $v_s$.
- For inputs with different content and structures, the Phonetic Encoder $E_p$ embedding the Phonetic vector $v_p$, which is fed into Speaker Discriminator $D_s$ to distinguish if the source is from the same speaker or not.
- To instruct the Phonetic Encoder $E_p$ embeds all information except for the speaker characteristic.
- Speaker Classifier $D_s$ is inspired from domain adversarial training, which outputs the score, representing how confident the discriminator $D_s$ will be that two audio source are from the identical speaker.
- The higher score means more confident on the same speaker.
- Phonetic encoder $E_p$ learns to confuse Speaker Classifier $D_s$.
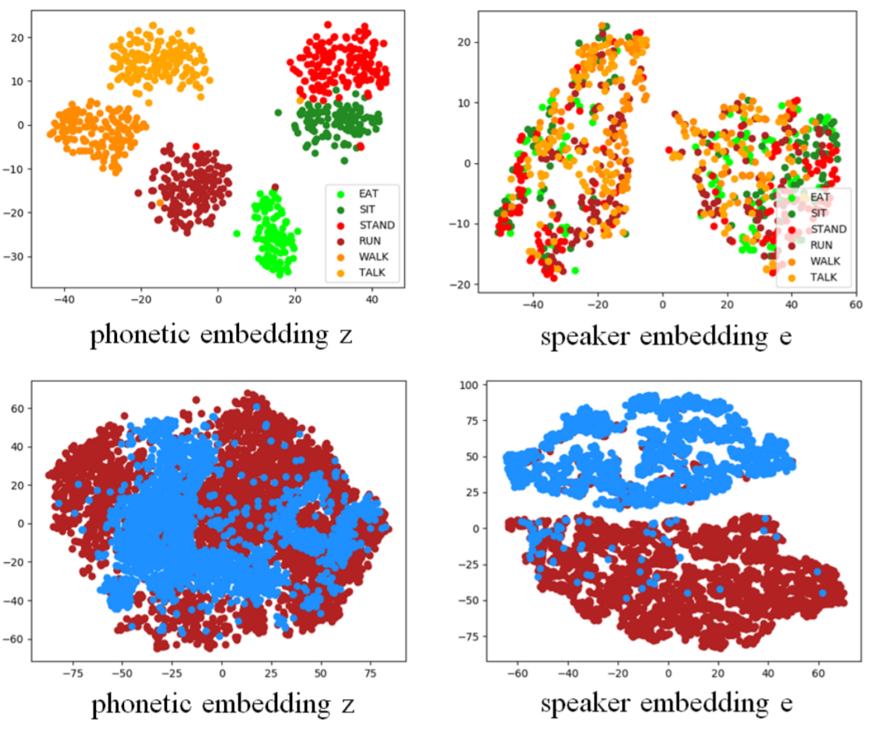
- After the well training, $D_s$ fail to distinguish whether the source is from the same speaker or not, and $E_p$ only generates embeddings with phonetic information.
- Each dimension of the input vector represents some characteristics, but the explicit relationship is unknown.
- Disentangle: understand the meaning of each dimension so as to control the output.
Attribute Modification
- Compute the center of each sampling with the same attributes and compute the distance between different sampling centers.
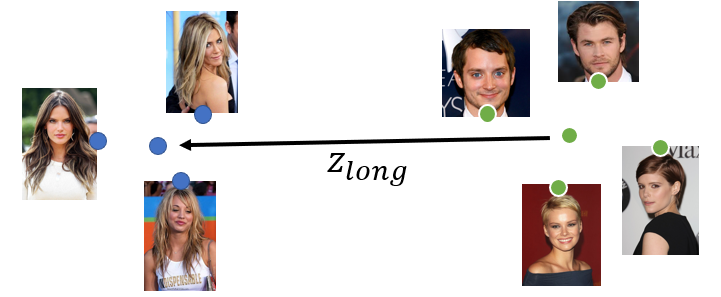
- Transform the characteristic by compensating the distance in the latent space.
Photo Editing
- Basic idea: find the optimum code $z^*$ in the latent space, closed to the original input image, at the same time fulltill the constraint.
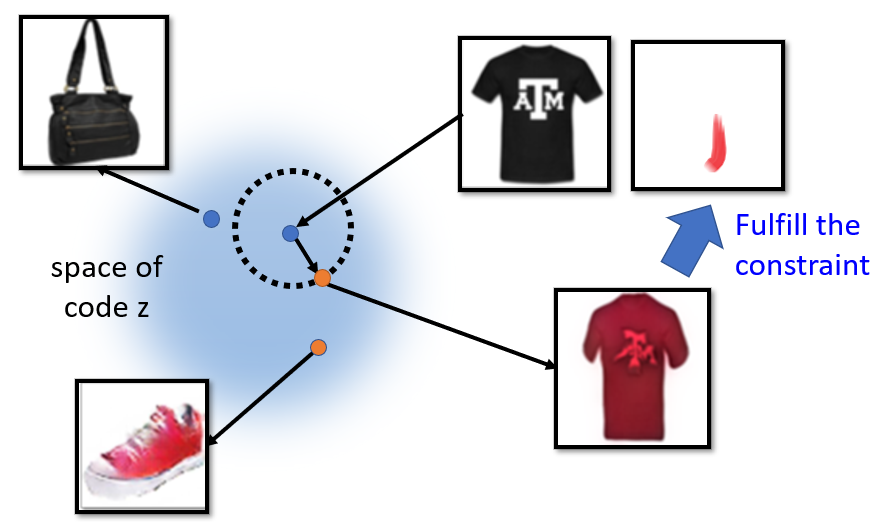
- Three methods to backtrace code $z^*$ from the input $x$:
- Gradient descent to find the optimal target:
$z^{*}=\arg \min _{z} L\left(G(z), x\right)$
The difference between $G(z)$ and $x$ can be measured by:
- Pixel-wise distance
- Another extractor network to evaluate the high level distance
- Well-trained auto-encoder structure to extract the latent code, transforming the input image back.
- Using the result from method 2 as the initialization of method 1 and fine-tune.
- Gradient descent to find the optimal target:
- Editing photos with input constraint:
- $z_0$ is the code of the input image previously found.
- $U$ is the function to judge if the final generation fulfill the constaint of the editing.
- $\left|z-z_{0}\right|$ make sure the result is not too far away from the original image.
- $D$ discriminator is to check the image realistic or not. \(z^{*}=\arg \min _{z} U(G(z))+\lambda_{1}\left\|z-z_{0}\right\|^{2}-\lambda_{2} D(G(z))\)
Others
TODO
- Many tasks as Image super resolution, Image completion, etc. are based on condition GAN.
Reference
- Machine Learning And Having It Deep And Structured 2018 Spring, Hung-yi Lee
- InfoGAN: Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets
- Autoencoding beyond pixels using a learned similarity metric
- Adversarial Feature Learning
- Triple Generative Adversarial Nets
- Domain-Adversarial Training of Neural Networks
- Improved Audio Embeddings by Adjacency-Based Clustering with Applications in Spoken Term Detection
- Generative Visual Manipulation on the Natural Image Manifold
- Neural Photo Editing with Introspective Adversarial Networks
- Photo-Realistic Single Image Super-Resolution Using a Generative Adversarial Network
- Globally and Locally Consistent Image Completion
PREVIOUSSequence and Evaluation